|
История создания
Подвижная двухкоординатная РЛС кругового обзора метрового диапазона
"Небо-СВ" (1Л13) предназначалась для обнаружения,
опознавания воздушных целей и выдачи их координат (дальности и
азимута) на сопрягаемые с ней пункты обработки РЛИ (пункты управления)
радиолокационеных рот (постов) ПОРИ-П1 из состава радиотехнических
бригад и батальонов и КП зенитных ракетных бригад войск ПВО СВ.
Предполагалось также использовать эту станцию в ВВС и в Войсках
ПВО (страны).
Разработка РЛС КО "Небо-СВ" проводилась в соответствии
с Решением Государственной комиссии СМ СССР по военно-промышленным
вопросам от 27 августа 1981 г. по ТТЗ ГРАУ МО и дополнению к нему.
Эти ТТЗ разрабатывали сотрудники ГРАУ и 3 НИИ МО Д. И. Носов,
А. П. Горин, Ю. Г. Сизов, С. Ф. Снопко, П. 3. Белоногов и другие
с участием сотрудников Управления начальника войск ПВО СВ.
Разработчиком РЛС "Небо-СВ" являлся Горьковский научно-исследовательский
институт радиотехники (ГНИИРТ) Минрадиопрома (главный конструктор
станции И. Г. Крылов).
Состав
| |
 |
| |
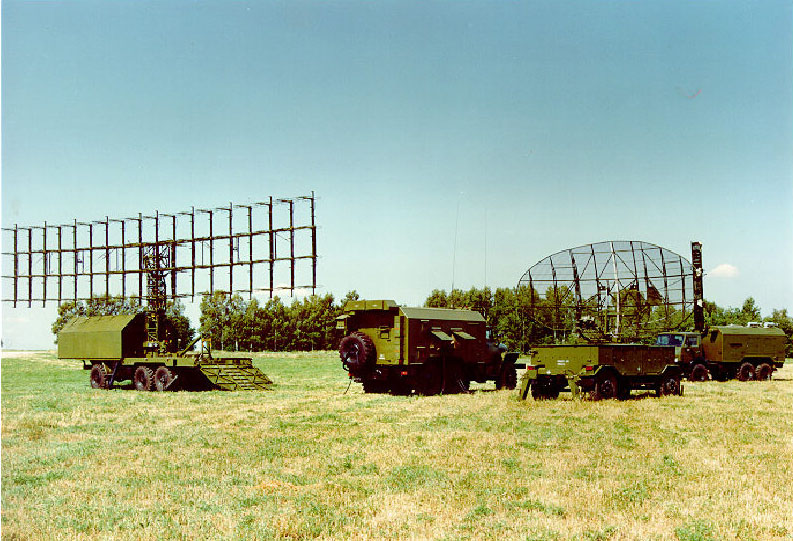
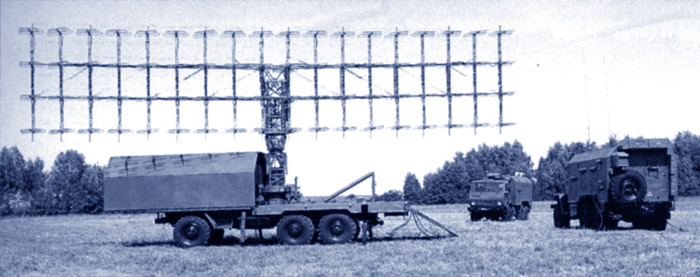
РЛС "Небо-СВ"
в боевом положении © НИТЕЛ |
| |
 |
| |
 |
| |
РЛС "Небо-СВ"
в походном положении © НИТЕЛ |
| |
|
| |
 |
| |
Антенно-поворотное
устройство (кабина АПУ) РЛС "Небо-СВ" в боевом положении
|
| |
|
| |
 |
| |
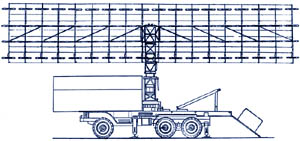
Схема
антенно-поворотного устройства (кабины АПУ) РЛС "Небо-СВ"
в боевом положении © Невский Бастион |
| |
|
| |
 |
| |
Аппаратный
модуль (кабина АП) на переднем плане, далее расположены наземный
радиолокационный запросчик (НРЗ) и кабина АПУ РЛС "Небо-СВ"
на выставке в Нижнем Новгороде © Невский Бастион |
| |
|
| |
 |
| |
Наземный
радиолокационный запросчик (НРЗ) в боевом положении на выставке
в Нижнем Новгороде © Невский Бастион |
| |
|
РЛС 1Л13 представляла собой подвижную когерентно-импульсную радиолокационную
станцию, размещенную на четырех транспортных единицах (три автомобиля
типа "Урал" и прицеп типа 2-ПН-4М).
На первом автомобиле (кабина АП) была размещена приемо-передающая
аппаратура, аппаратура защиты от помех, индикаторная аппаратура,
аппаратура автосъема и передачи РЛИ, имитации, связи и документирования,
сопряжения с потребителями РЛИ, функционального контроля и непрерывной
диагностики, аппаратура НРЗ (кроме антенно-поворотного устройства),
источники вторичного питания и аппаратура жизнеобеспечения. На
втором автомобиле (кабина АПУ) было размещено антенно-поворотное
устройство (АПУ) РЛС. На третьем автомобиле размещалась серийная
дизельная электростанция типа ЭД2хЗО-Т230П-ЗРА. АПУ НРЗ и кабели
сопряжения располагались на указанном прицепе, который буксировался
первым или третьим автомобилем. РЛС могла доукомплектовываться
двумя выносными индикаторами кругового обзора и кабелями сопряжения
с потребителями РЛИ.
Антенная система РЛС состояла из основной антенны, представлявшей
собой плоскую эквидистантную решетку из 72 излучателей, и дополнительной
трехэлементной решетки, установленной с обратной стороны основной
антенны. В основной антенной решетке имелось шесть пассивно сформированных
фрагментов, соединенных с антенными коммутаторами.
Эхо-сигналы, принятые фрагментами решетки, через антенные коммутаторы
поступали на широкополосные усилители высокой частоты, а затем
на диаграммообразующую схему (ДОС), где соответствующим сложением
сигналов шести фрагментов основной решетки формировался основной
и два компенсационных канала для защиты РЛС от активных шумовых
помех (АШП) по боковым лепесткам ДНА. Третий компенсационный
канал для защиты от АШП со стороны задней полусферы формировался
с помощью дополнительной (задней) антенны.
Сигналы с выходов ДОС через токосъемник, систему усиления, преобразования
частоты и устройство нормирования динамического диапазона помех
поступали на трехканальный автокомпенсатор АШП и через компенсатор
- на аппаратуру индикации помеховой обстановки.
Заданная для станции зона обзора в угломестной плоскости обеспечивалась
путем оперативного электромеханического наклона антенной решетки
в вертикальной плоскости на фиксированные углы - 0, +9 и +13°.
Основной режим работы - наклон антенны под углом +9°.
Передающая система РЛС состояла из возбудителя, предварительного
широкополосного усилителя (ПШУ), модулятора и мощного широкополосного
усилителя (МШУ). В возбудителе производилось преобразование эталонного
сигнала фиксированной длительности, манипулированного кодом Баркера,
с промежуточной частоты на одну из рабочих частот РЛС. Выходной
сигнал возбудителя усиливался в ПШУ, а затем в МШУ. МШУ был выполнен
на широкополосном эндотроне. В РЛС было установлено два эндотрона
- основной и резервный. Время переключения с основного эндотрона
на резервный - 8 мин. Было возможно экстренно осуществить переключение
за 3 мин.
С выхода автокомпенсатора АШП сигналы в аналоговом виде поступали
на два (синфазный и квадратурный) фазовых детектора и два аналого-цифровых
преобразователя (АЦП). Преобразованные в цифровую форму сигналы
поступали в аппаратуру СДЦ и далее в аппаратуру оптимальной фильтрации,
где обеспечивалось сжатие полезного сигнала до длительности одного
кванта (3,3 мкс), и затем в некогеретный накопитель.
Аппаратура СДЦ была выполнена на базе цифрового режекторного
фильтра с устройством автокомпенсации доплеровского сдвига частоты
пассивной помехи на входе фильтра. На выходе фильтра по данным
схемы межобзорного картографирования помех осуществлялась автоматическая
стабилизация уровня ложных тревог.
С некогерентного накопителя сигналы поступали в систему автосъема
информации, а через АЦП ~ на индикатор кругового обзора (ИКО).
В состав системы автосъема входили устройство первичной обработки
сигналов, спецвычислитель, устройство стробирования, аппаратура
сопряжения с потребителями РЛИ и телекодового обмена цифровой
информацией между РЛС и этими потребителями (ПОРИ-П1 и др.).
Эта система осуществляла измерение и кодирование координат целей
с учетом их высоты (угла места), получаемой от сопряженного со
станцией радиовысотомера (ПРВ-13, ПРВ-16, ПРВ-17) и выдавала их
потребителям и на ИКО, два из которых были выносными. В РЛС 1Л13
были реализованы следующие виды съема информации: визуальный -
по координатной сетке ИКО, ручной - с использованием маркера,
полуавтоматический - с замещением координат маркера на ближайшую
контрольную точку автомата и автоматический.
Имитатор станции позволял производить тренировки расчета РЛС,
формируя сигналы до 20 своих и чужих целей, сигналы опознавания
и различные виды помех.
Аппаратура опознавания состояла из серийно выпускаемого НРЗ с
антенно-поворотным устройством также от серийного запросчика.
При импульсной мощности 120 кВт, чувствительности приемника
-103 дБ/Вт и ширине ДНА по азимуту 6° РЛС 1Л13 обеспечивала в
режиме "Основной луч" (при угле наклона антенны 9°)
обнаружение самолета-истребителя в беспомеховой обстановке с вероятностью
0,8 в зоне с границами:
по дальности:
на высотах:
100 м ............................. 22,5-27,5 км;
500 м ............................. 45-57 км;
10000 м ........................... 236-273 м;
27000 м........................... 335-425 км;
по азимуту .......................... 360°;
по углу места........................ 25-29°;
по высоте (без провалов) ............. от 23 до 42,5 км.
В режиме "Нижний луч" (при угле наклона антенны 0°)
дальность обнаружения цели под малыми углами места возростала
до 29 км на высоте 100 м и до 278 км на высоте 10000 м.
В режиме "Верхний луч" (при наклоне антенны на 13°)
обеспечивалось увеличение верхней границы зоны обнаружения по
углу места до 30'.
При воздействии на станцию активных шумовых, пассивных и комбинированных
помех заданных уровней дальность действия РЛС по цели на высоте
10000 м не снижалась более чем до 200 км. В станции обеспечивалась
поимпульсная перестройка рабочей частоты при воздействии прицельных
помех.
Коэффициент подпомеховой видимости цели на фоне отражений от
местных предметов составлял не менее 50 дБ.
Среднеквадратические ошибки измерения координат цели не превышали
600 м по дальности и 1° по азимуту. Ошибки измерения угла места
(высоты) цели определялись точностью сопряженного с РЛС радиовысотомера.
Разрешающая способность станции на расстоянии более 50 км составляла
по дальности не более 1000 м и по азимуту 6°. По углу места (высоте)
цели разрешались в соответствии с возможностями сопряженных со
станцией радиовысотомеров.
Период кругового обзора станции составлял 10 с или 20 с. В режиме
автосъема информация могла быть получена не менее чем о 50 целях.
Время развертывания станции составляло 40 мин, а время включения
при работающей электростанции - 3 мин.
Боевой расчет станции состоял из 6 чел.
Испытания
Указанные ТТХ станции "Небо-СВ", соответствующие требованиям
к ней, были подтверждены результатами государственных полигонных
испытаний станции на Донгузском полигоне (начальник полигона А.
И. Черпита, его заместитель О. П. Сябрюк, начальник ведущего отдела
Г. В. Ивасенко) в январе-июне 1985 г.
Этими испытаниями руководила комиссия, которую возглавлял Г.
Г. Павличенко. В комиссию входили А. П. Горин, В. Е. Батанов,
П. 3. Белоногов, С. С. Скрынников, И. Г. Крылов, М. А. Медов и
другие представители МО СССР и промышленности.
В анализе результатов испытаний участвовали сотрудники полигона,
промышленности, 3 НИИ МО, научно-исследовательских учреждений
и учебных заведений войск ПВО СВ и Войск ПВО (страны), ВВС.
Комиссия рекомендовала принять РЛС "Небо-СВ" на вооружение
Советской Армии и внедрить ее в серийное производство.
Принятие на вооружение
В 1986 г станция 1Л13 была принята на вооружение войск ПВО СВ,
Войск ПВО и ВВС.
Серийное производство станции было организовано в Производственном
объединении "Горьковский телевизионный завод" (АО "НИТЕЛ"
в настоящее время) Минрадиопрома.
В создание достаточно совершенной и мобильной РЛС дежурного режима
"Небо-СВ", используемой в трех видах Вооруженных Сил
нашей страны, вложен большой труд инженеров и конструкторов ГНИИРТ,
которых возглавлял И. Г. Крылов. Наибольший вклад в создание
станции внесли сотрудники этого института Е. П. Корякин, М. А.
Медов, М. А. Островский, Л. А. Рожанский, В. А. Лазарев и другие.
Разработке этой станции содействовало военно-научное сопровождение
ее сотрудниками 3 НИИ МО Ю. Г. Сизовым, С. Ф. Снопко, П. 3. Белоноговым.
Станция "Небо-СВ" стала основным средством разведки
воздушного противника в ПВО СВ, образуя дежурное радиолокационное
поле в оперативном звене войсковой ПВО. Высокие боевые и эксплуатационные
характеристики этой станции неоднократно подтверждались на различных
учениях и при несении боевых дежурств формированиями ПВО СВ в
составе групп наших войск за рубежами бывшего СССР. Современные
элементная база и технические решения, заложенные в станцию, в
сочетании с указанными ТТХ РЛС 1Л13 позволяли станции быть конкурентоспособной
с зарубежными станциями подобного назначения.
Тактико-технические данные
| РЛС |
1Л13
|
| Дальность обнаружения, км: |
|
| - на предельно малой высоте |
радиогоризонт
|
| - максимальная |
330 (360)
|
| Предел работы по скорости,
км/ч |
без ограничений
|
| Предел работы по высоте, км |
40
|
| Частота вращения антенны, об/мин |
6
|
| Время развертывания, мин |
40
|
| Потребляемая мощность, кВт |
29
|
| Расчет, чел. |
6
|
Источники информации
С. Петухов, И. Шестов. История создания и развития вооружения
и военной техники ПВО сухопутных войск России. Издательство "ВПК".
1999
С.
Ганин, А. Карпенко, В. Жизневский, Г. Федоров. ЗЕНИТНАЯ РАКЕТНАЯ
СИСТЕМА С-300. Невский Бастион №3, 1997 г.
Веб-сайт "Музей
ОАО "НИТЕЛ"
|