| |
История создания
 |
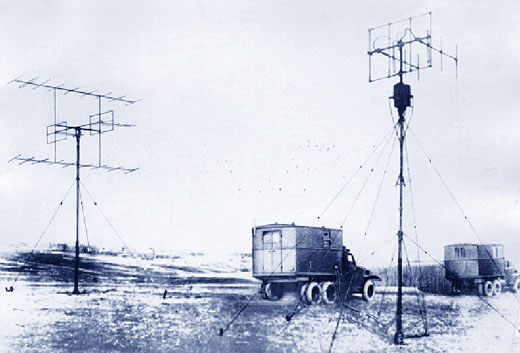
| РЛС П-3 |
Постановление ГКО от 20 марта 1943 г. помимо радиодальномера
для МЗА предусматривало разработку в НИИ радиопромышленности новой
РЛС дальнего обнаружения. Необходимость такой разработки диктовалась
следующими причинами:
1. Станции РУС-2 и РУС-2с были созданы для службы ВНОС. Но опыт
войны показал, что они несли службу и раннего предупреждения,
и как станции наведения истребительной авиации ПВО, а в отдельных
случаях и как станции целеуказания ЗА.
2. Как станции наведения и целеуказания РУС-2 и РУС-2с не в полной
мере удовлетворяли требованиям по точности определения координат
и зонам действия.
3. Накопленный в годы воины опыт конструирования и производства
позволял повысить эксплуатационную надежность и упростить обслуживание
станции.
Тактико-технические требования к этой станции были разработаны
НИИИС КА и утверждены командованием войск ПВО. Ими предусматривалось:
— дальность обнаружения — не менее 130 км, пеленгования — 70 км;
— точность определения азимута при обнаружении— 4° и пеленгования—
1,3°;
— точность определения дальности — 650 м и высоты—300—700 м;
— определение координат цели по азимуту — от О до 360° и по углу
места — от 4 до 18°;
— время определения трех координат — не более 25 с;
— длина волны—4,16 м;
— мощность излучения в импульсе — 80—100 кВт, длительность импульса—
10—15 мкс.
Станция создавалась в разборном варианте с двумя антеннами — зондирующей
(вертикальной) и азимуталь-
Инженерной особенностью новой РЛС, названной П-3, являлась ее
антенная система, состоявшая из двух антенн — азимутальной, сигналы
с которой поступали на
вход приемника через антенный переключатель, и вертикальной, которая
при излучении работала от передатчика, а в период паузы переключалась
на прием и работала вместе с азимутальной антенной.
Приближенное определение азимута производилось обычным способом
—• по максимуму амплитуды сигнала от антенны, направленной на
самолет. В режиме точного определения азимута за счет действия
антенного переключателя и соединения между собой обеих частей
азимутальной антенны в протнвофазе на экране отметчика при ориентировании
системы на цель были видны два раздвинутых по шкале импульса равной
амплитуды; при уходе цели вправо или влево относительно оси антенны
один импульс возрастал, а другой уменьшался.
Для определения высоты полета самолетов использовалась система,
состоявшая из двух антенн типа «волновой канал», установленных
на разных высотах от поверхности земли (7 и 11 м). Каждая из этих
антенн через свой фидер подключалась к аппаратуре станции через
специальный гониометр. От положения ползунка гониометра зависела
результирующая характеристика направленности обеих антенн в вертикальной
плоскости.
Угол места цели определялся по пропаданию сигналов в момент перемещения
ползунка гониометра (нулевое излучение и прием). По дальности
и найденному углу места с помощью номограммы определялась высота
полета цели. Управление характеристикой направленности антенн
в вертикальной плоскости позволило не только определить высоту
полета, но н устранить мертвые зоны наблюдения в достаточно широких
пределах. Однвременное использование гониометра при передаче и
при приеме позволило вдвое повысить пелеигационную чув-ствигелыюсть
станции.
НИИ успешно выполнил разработку и в период с 20 июля по 15 августа
1944 г. станция П-3 проходила под Москвой заводские испытания,
подтвердившие соответствие РЛС заданным требованиям заказчика.
ГАУ1, не ожидая окончательно доводки станции и ее полигонных испытаний,
внесло в ГКО предложение об изготовлении в том же году опытной
партии РЛС. ГКО принял предложения ГАУ и обязал НИИ выпустить
в IV квартале 1944 г. 14 комплектов станции П-3.
Полигонные испытания станции П-3, проведенные на НИЗАП ГАУ (инженер-испытатель
Г. Т. Опрышко) в январе — феврале 1945 г., подтвердили положительные
выводы заводских испытании под Москвой и показали следующие результаты:
р р паи '
Дальность обнаружения са-
4000 ы, км .... 30— 95 95—100 95— 100 110
наружения, км ... 150 ISO 160 160
Точность ^определения даль- 1000 1000 1000 850
мута, град .... 2—3 2-3 2-3 1.3
при углах места 3,5—4,5° Не< предел пет :я 750
при углах места 8-18° Не ][|li'.lLYIil".'T -я 600
На основании этих испытаний было рекомендовано выпускать станции
П-3 Бзамеа РУС-2, РУС-2с (П-2М). НИЗАП ГАУ особо отметил в своем
отчете простоту конструкции РЛС П-3, ее высокую надежность в эксплуатации
и отсутствие в обзорной диаграмме направленности антенны мертвых
зон в вертикальной плоскости.
В разработке станции участвовали: И. Н. Антонов, Е. Я. Богуславский,
Р. С. Буданов, И. И. Вольман,
А. Р. Вольперт, С. П. Заворотишев, Л- В. Леонов, П. В. Подгориов
и др.
В 1945 г. РЛС П-3 была принята на вооружение войск ПВО, ВВС и
ВМФ и выпускалась в значительных количествах в автомобильном (П-3А)
и в разборном (по типу РУС2с) вариантах.
Тактико-технические данные
| РЛС |
П-3А
|
П-8
|
П-10
|
| Дальность обнаружения,км |
120
|
150
|
200
|
| Высота обнаружения,км |
10
|
10
|
15
|
Источники информации
С. Петухов, И. Шестов. История создания и развития вооружения
и военной техники ПВО сухопутных войск России. Издательство "ВПК".
1999
Веб-сайт
"Музей ОАО "НИТЕЛ"
|
|